Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Predavanje br.
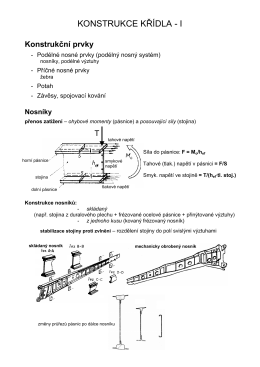
Konstrukce křídla.pdf
Procjena uticaja na životnu sredinu
Predavanje 8-TEMELJI I POTPORNI ZIDOVI.pdf
Linearna preslikavanja i matrice
Našou obcou sa prehnala veterná smršť, ktorá spôsobila veľké
01 Resetkasti nosaci.pdf
SADRŽAJ ČASOPISA „NAŠA ŠKOLA“ BR.64 ( 234 ) / 2013
II DEO DINAMIKA PROCESA I DRUGIH ELEMENATA SISTEMA
Predavanje br.1
03 Sistem prizvoljnih sila i spregova u ravni.pdf
null
Predavanje br.7