Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
null
Oznámení rozhodnutí o přijetí-nepřijetí k prázdninovému
Hukum dan Teorema Limit - eLisa UGM
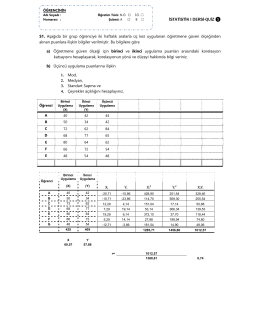
İSTATİSTİK I DERSİ-QUİZ Xi Yi Xi 2 Yi 2 XiYi - eyd
null
BODOVANJE DASH-a - Institute for Work & Health
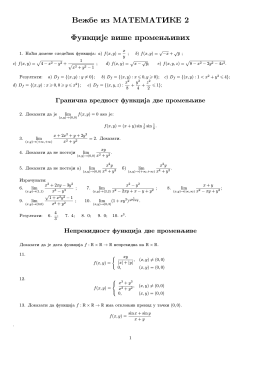
Ve be iz MATEMATIKE 2 Funkcije vixe promenljivih
Ders 3(MBA 507):Taleptahmini_I
null
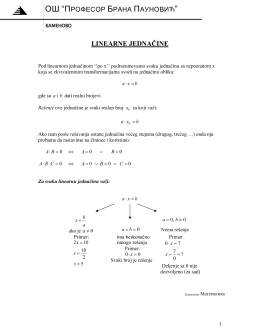
LINEARNE JEDNAČINE - kamenovomatematika
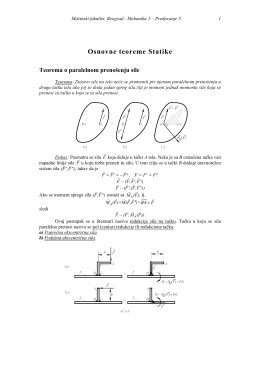
Predavanje br.7
03 Sistem prizvoljnih sila i spregova u ravni.pdf
File - INDUSTRIJSKA ŠKOLA SPLIT (nastavni materijali)
Задаци
01 Resetkasti nosaci.pdf
4. - Weebly
Cenzusowa wielkość populacji
Raspored izlaganja
Silabus za ekol. inz. sk.god. 2014-2015.pdf
Predavanje br.
5 MTK Kodovanje govora
np đubriva - Gnojidba.info
23 Mart Dünya Meteoroloji Günü Mesajı