Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Predavanje br.7
grupa d2
Našou obcou sa prehnala veterná smršť, ktorá spôsobila veľké
null
03 Sistem prizvoljnih sila i spregova u ravni.pdf
Dr$i$LEni naxaNl,rcr
10 Numaralı Karar - Velimeşe Organize Sanayi Bölgesi | Velimeşe
Predavanje br.9
null
Skripta_Mehanika 2
Kinematika hmotného bodu
Obrtanje tela oko nepokretne ose Ugaona brzina tela koje se obrće
tehnička mehanika - fakultet zaštite na radu
(PDF, 950KB)
Predavanje br.
Sferno kretanje tela (Obrtanje tela oko nepokretne tačke)
Predavanje br.1
Vektori
Ubrzanje - WordPress.com
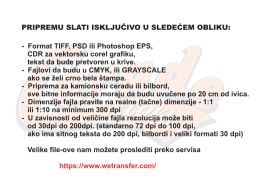
Uputstvo za slanje fajlova