Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sferno kretanje tela (Obrtanje tela oko nepokretne tačke)
59 KB - Delta
Predavanje br.5
P8_vibrace _ESF.pdf - Technická univerzita v Liberci
pobierz katalog - multi-chem
MELFA Průmyslové roboty - e
Obrtanje tela oko nepokretne ose Ugaona brzina tela koje se obrće
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
TV29LB929
možnosti, příklady dobré praxe a úskalí supervize v
Skripta_Mehanika 2
İndeks
OLUJNI VETROVI KAO HAZARD
Predavanje br.7
Predavanje br.9
Hakan Erdem - romatolojide son 2 yıl
Plan i program za Mehaniku 2
Pedagogický pub-kvíz
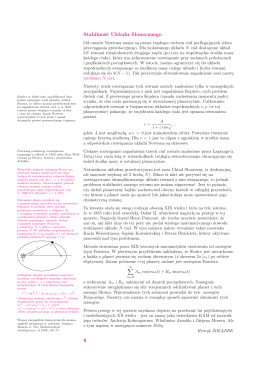
Równanie dyfuzji w opisie zjawisk zachodzących w heliosferze
Scenariusz zakończenia roku szkolnego w przedszkolu