Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
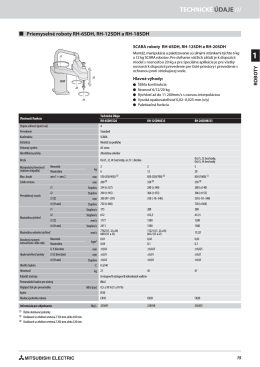
MELFA Průmyslové roboty - e
katalóg robotov
(fiaQ^u.) \Ji2j^nilmii3nw 2559 1. ufisjRfii^an 1. fu?l3Tp)1 15 SWIfitl
pobierz ulotkę
Čelný lopatový nakladač 980H
Čelný lopatový nakladač 950H
Roboter Family Catalogue
Elektroniczne wskaźniki położenia z napędem - CDM
Detektory úniku
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
Predavanje br.5
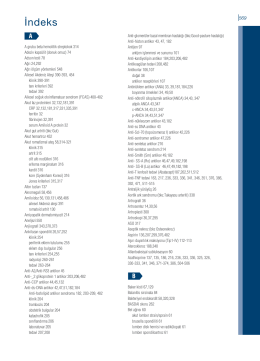
İndeks
Sferno kretanje tela (Obrtanje tela oko nepokretne tačke)
přednáška1 (.pdf)
TECHNICKÁ UNIVERZITA V KOŠICIACH
Hakan Erdem - romatolojide son 2 yıl
Elektronické ukazatele polohy - CDM
W Laboratorium Robotyki znajdują się m.in.: robot Kawasaki
Riadenie robota rozpoznávaním ľudských pohybov pomocou
Politechnika Łódzka, Wydział Mechaniczny, Instytut Obrabiarek i
PowerPoint - ศูนย์อนามัยที่ 5
Ovum LTE450 presentation