Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Predavanje br.9
Predavanje br.1
pravi tehnički podaci
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
Ostvarena Teslina vizija o gravitacinoj mašini
Skripta_Mehanika 2
Obrtanje tela oko nepokretne ose Ugaona brzina tela koje se obrće
(PDF, 950KB)
Predavanje br.2
Ubodne i univerzalne testere
Predavanje br.7
izvan vremena i prostora
Teorija etra sa eksperimentalnom verifikacijom
null
Sferno kretanje tela (Obrtanje tela oko nepokretne tačke)
Ispit iz Matematike II
Plan i program za Mehaniku 2
Predavanje br.1
7288-Matematika-Obrtna tela
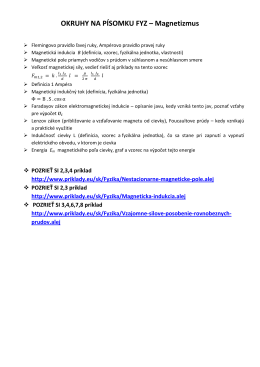
OKRUHY NA PÍSOMKU FYZ – Magnetizmus
File
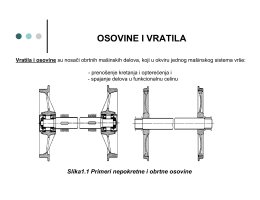
OSOVINE I VRATILA
Predavanje br.