Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Predavanje br.5
ISPITNA PITANJA IZ FIZIKE I RAZRED ( III stepen ) 1.Referentni
PROGRAM OGRANICZENIA NISKIEJ EMISJI dla Gminy Zawiercie
(ingilizce) bölümü 2014/15 öğretim pr
Predavanje br.2
DAF XF105 - D Truck Puls
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
Problemi urinarnog trakta pasa i macka.pdf
MIS
Sferno kretanje tela (Obrtanje tela oko nepokretne tačke)
İndeks
İndir - WordPress.com
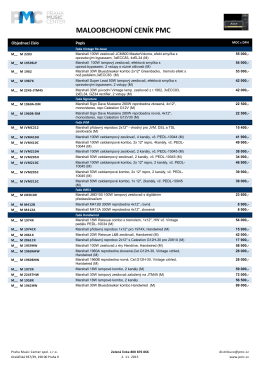
Marshall nástrojové aparatury, efekty
Ako si to Vy viete predstaviť, tak to my vieme
Pascal
MELFA Průmyslové roboty - e
Caractérisation de nanostructures de Fe élaborées sur substrat
Keplerova úloha – problém dvou těles
zde
Řešení - Fykos
SVODJENJE NA KANONSKI OBLIK (KRIVE
ulotka - Globus
strana 1