Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
null
null
03 Sistem prizvoljnih sila i spregova u ravni.pdf
null
O (intelektualnych) pożytkach z wyprawy na cudze terytorium
8. Delfi metod(26.02.2014.)
Test - Druhý_pohybový_zákon
Silabus za ekol. inz. sk.god. 2014-2015.pdf
Predavanje br.7
Predavanje br.9
ilgi yazı için tıklayınız - Dinar İlçe Milli Eğitim Müdürlüğü
tehnička mehanika - fakultet zaštite na radu
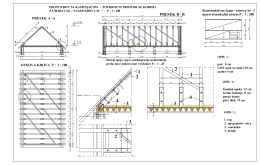
PROST KROV SA RASPINjAČOM
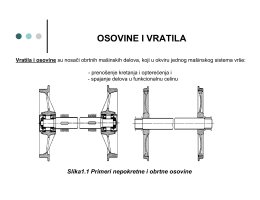
OSOVINE I VRATILA
Pulty na prípravu palaciniek,gofry
екстерна матура
İngiliz Dilbilimi Bölümünün Erasmus+ Anlaşmaları
HALE Br. 04
Predavanje br.
Z B I R K A
Prirodno-matematički fakultet Društvo matematičara i fizičara Crne
Koliko smem da pozajmim? Šta bi trebalo da uradim ukoliko nisam
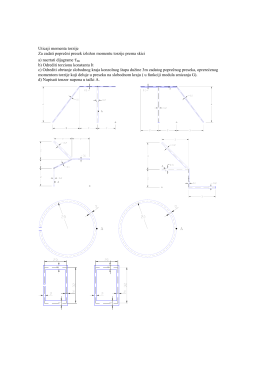
Uticaji momenta torzije Za zadati poprečni presek izložen momentu