Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
03 Sistem prizvoljnih sila i spregova u ravni.pdf
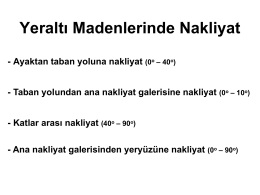
Yeraltı Madenlerinde Nakliyat
Sbírka úloh z mechaniky (autorem je doc. Habrman)
Modelování fyzikálních dějů numerickými metodami
null
MIBG-131 do terapii
ห้องสมุดมหาวิทยาลัยโตเกียวที่ได้ไปเยือน
null
instrukcja obsługi - Bank Spółdzielczy w Chodzieży
Predavanje br.7
Bezvodni ofSet čUva okolinU
HYTORC kartuşlu tork anahtarı
T.C. KULA KAYMAKAMLıĞı ilçe Miııi Eğitim Müdürlüğü
Structural Properties of Copper, Silver and Gold Nanorods under
null
Predavanje br.
TARİH GÜN ADI SOYADI BRANŞI 1.4.2015 ÇARŞAMBA Dr. Fatma
Toplantı Katılım Listesi.pdf
ULTRAZVUK AUTORI: MENTOR:
r - Elektrotehnički fakultet Istočno Sarajevo
01 Resetkasti nosaci.pdf
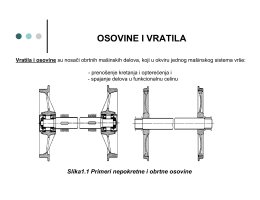
OSOVINE I VRATILA
CS - Europa.eu