Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Predavanje br.1
Rugós mechanikai rendszerek modellezése 1. feladat Adott két
Geografija
Informatyka Stosowana II rok (semestr zimowy) Mechanika i
KOMBINOVANI ZADACI ZA PRIPREMU ZA OLIMPIJADU
Skripta_Mehanika 2
Еуклидска геометрија
ANALITICKA GEOMETRIJA
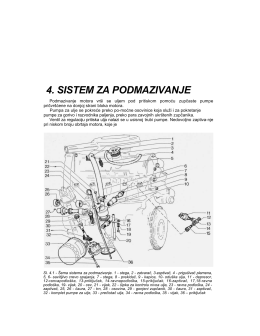
4. SISTEM ZA PODMAZIVANJE
I GRUPA - Visoka turistička škola
linkten
lekcija 2
izvan vremena i prostora