Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Predavanje br.2
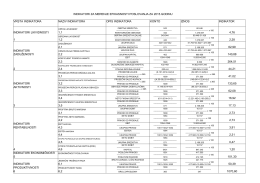
INDIKATORI ZA MERENJE EFIKASNOSTI POSLOVANJA ZA 2015
Predavanje br.5
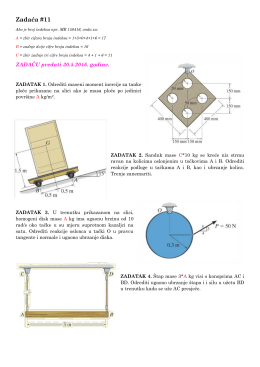
Zadaća #11
Predavanje br.1
Skripta_Mehanika 2
Predavanje br.9
Osnove programiranja NC
ovde. - facts
Digital Active Outdoor DVB-T/T2 Antenna SRT ANT 15 ECO
Bölüm 1_Maddesel Noktanın Kinematiği
Rešenja zadataka sa pismenog dela ispita iz predmeta Matematika
Predavanje br.