Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Bölüm 1_Maddesel Noktanın Kinematiği
ovde. - facts
hibrit ölçümlerle hedef kestirim algoritması tasarımı
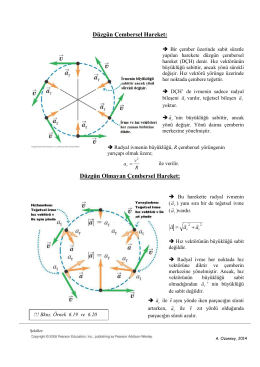
Düzgün Çembersel Hareket: Düzgün Olmayan Çembersel Hareket:
ME 346İndir
BÖLÜM 5: MADDESEL NOKTANIN KİNETİĞİ: İZAFİ HAREKET 5.1
Osnove programiranja NC
Parçacık Kinematiği
İngiliz Dilbilimi Bölümünün Erasmus+ Anlaşmaları
eğitimler
Document
Silindirik Düz Dişli Çarklar
Dişli çarklar_01 - Mehmet Adem Yıldız
Predavanje br.2
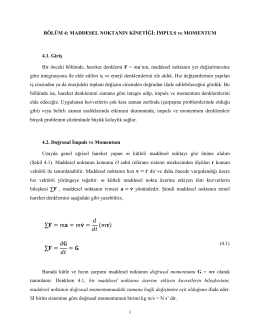
MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1
x - Trakya Üniversitesi
NOKTALAMA İŞARETLER sunu
Büyük Veri KahramanıVeri Bilimci
Rešenja zadataka sa pismenog dela ispita iz predmeta Matematika
MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1
Öğr.Gör.Barış ŞAHİN DERS NOTU 3
İndir (PDF, 1.57MB) - Türk Kooperatifçilik Kurumu
Sorular