Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
II DEO DINAMIKA PROCESA I DRUGIH ELEMENATA SISTEMA
Učební text k přednáškám PDF - Ústav nových technologií a
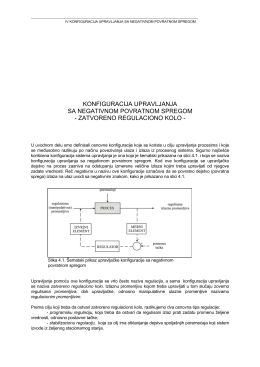
zatvoreno regulaciono kolo
Стабилност система
EKLER
Predavanje br.
Disertacija4859.
Dizajn fuzzy kontrolera - Vanr.prof.dr. Lejla Banjanović
Teorija sistema
Matematicka analiza 2
Identifikacije
PITANJA ZA USMENI DEO ISPITA IZ ANALIZE KOLA
MATERIJAL ZA VEZBE Predmet: MATEMATICKA ANALIZA 2
Mechanika tekutin Část 6. - Strojnícka fakulta
Czech with English comments (PDF file, M. Hokr)
Lineer Tek Serbestlik Dereceli (TSD) Sistemlerin Tepki Analizi