Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Czech with English comments (PDF file, M. Hokr)
Učební text k přednáškám PDF - Ústav nových technologií a
spojitost a souvislost
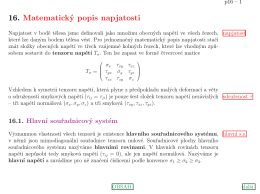
MECHANIKA KONTINUA
Hydraulika podzemní vody II (1) 19.2.14. Přetékání, rovnice
calcul direct de G en fonction de l`avancement
regulamin_ostatni 2.pages - Zespól Szkół nr 7 w Bydgoszczy
vyšetrovanie mechanických vlastností materiálov metódou
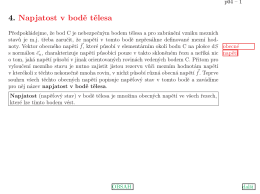
Napjatost
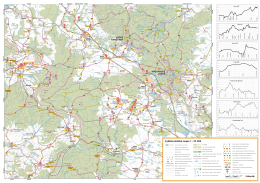
cyklomapa
chapitre 2 fonction enthalpie libre G
reseni
Teoretická a aplikovaná mechanika (TAM) Prednáška 01
Napjatost
Patobiomechanika srdečněcévního systému
vliv velkých firem na ekonomiku české republiky
Patobiomechanika srdečněcévního systému
II DEO DINAMIKA PROCESA I DRUGIH ELEMENATA SISTEMA
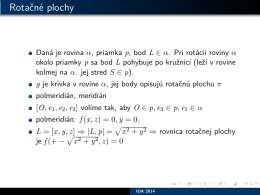
Kvadratické plochy
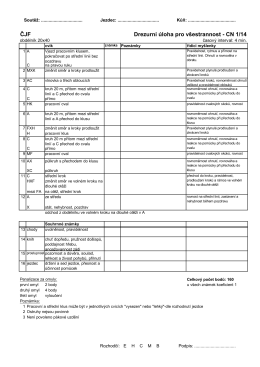
CN1/14 - Všestrannost
Řešení 16) Stacionární řešení: x ≡ −1, v t = 0 x nemění znaménko
Export Decision under Risk