Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Patobiomechanika srdečněcévního systému
Patobiomechanika srdečněcévního systému
Kalibrační teorie
Mikroklima porostu
bytová družstva SVJ správa domů
HUMAN BIOMECHANICS 2012 5th-7th November 2012, Třešť
Namety ETV - Etická výchova
SZZ - Zpracování a rozpoznávání obrazu.pdf
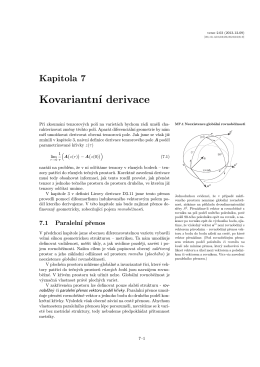
Kovariantní derivace
biologické účinky elektromagnetických polí
Hydraulika podzemní vody II (1) 19.2.14. Přetékání, rovnice
ZÁKLADNÍ FYZIKÁLNÍ ZÁKONY
Volitelné předměty 2015-2016 - České vysoké učení technické v Praze
Terapia zajęciowa I stopień - Olsztyńska Szkoła Wyższa im. J
Fyzika - okruhy pro státní bakalářskou zkoušku studijní obor Fyzika
Funkcionální rady
Studijní text [pdf] - Personalizace výuky prostřednictvím e
conf-dop_hcc-cz.pdf
Sbírka úloh z fyziky se zaměřením na oborovou problematiku
T - Fyzika Zeme
Laserové robotické pracoviště v ksk
Funkcionální rady
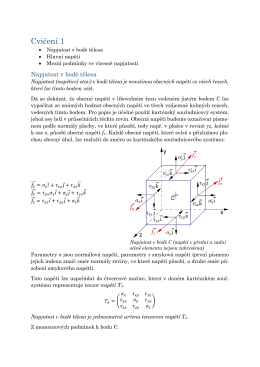
Cvičení 1


![Studijní text [pdf] - Personalizace výuky prostřednictvím e](http://s2.readgur.com/store/data/000164552_1-d4316080ac88da6d0ebe7822963943fb-260x520.png)