Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
zatvoreno regulaciono kolo
Indeks pojmova
II DEO DINAMIKA PROCESA I DRUGIH ELEMENATA SISTEMA
Broj 1 - Tehnička Dijagnostika
Warunki osadnictwa w Łodzi w I połowie XIX wieku w świetle
ma-Frico-Thermozone Portier-SE-GB
Disertacija4859.
Стабилност система
Metodi aproksimacije amplitudnih i faznih karakteristika analognih
Medonosna pčela (Apis mellifera)
Teorija sistema
MODELIRANJE KONSTRUKCIJA
Dizajn fuzzy kontrolera - Vanr.prof.dr. Lejla Banjanović
Identifikacije
PITANJA ZA USMENI DEO ISPITA IZ ANALIZE KOLA
144 dana Sećanja na zvezde - Foundation for the Law of Time
Osnove buke, vibracija i vibracija na ljudskom tijelu
PITANJA ZA REPUBLIČKO TAKMIČENJE IZ MULTIMEDIJE
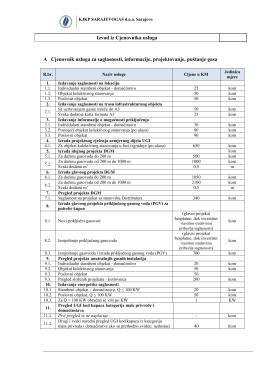
Izvod iz Cjenovnika usluga A Cjenovnik usluga za
1 ŠTEDNJAK ZA ETAŽNO GREJANJE NA ČVRSTA
uputstvo za rukovanje gasnom opremom
ovdje
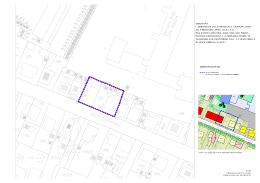
odluka Layout1 (1)