Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Стабилност система
Program Procesinga `14
овде
II DEO DINAMIKA PROCESA I DRUGIH ELEMENATA SISTEMA
8. Delfi metod(26.02.2014.)
Priprema za pismenu vežbu
Prijemni – Analiticka geometrija
zadaci iz geometrije 1. razred 2014.
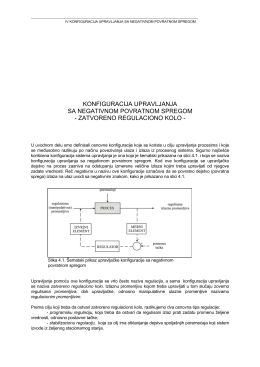
zatvoreno regulaciono kolo
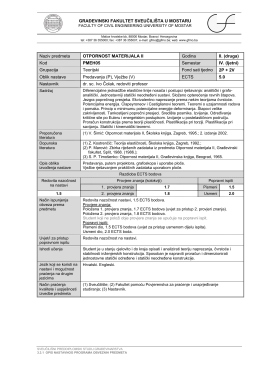
Kod PMEH05 Semestar IV.
Odsecanje (clipping) objekata
Nurdağı İlçesi, Yeni Mahalle kültürel tesis alanı nazım imar plan
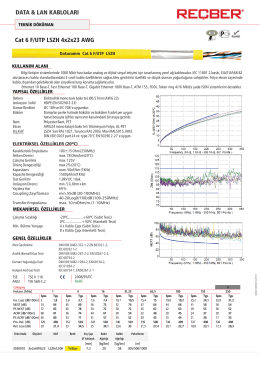
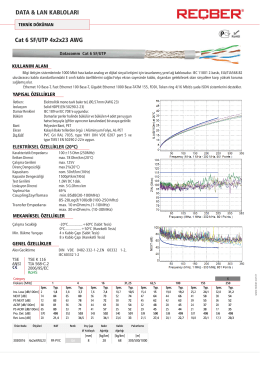
Cat6 SF-UTP (PVC)
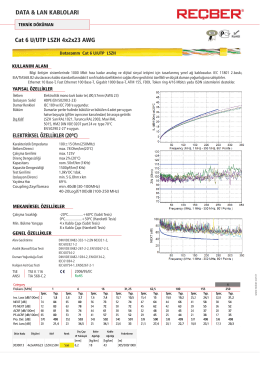
Cat6 U-UTP (LSZH)
Cat6 U-UTP (PE)
Teorija sistema
s - Düzce Üniversitesi
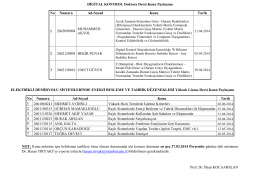
Prof.Dr. İlhan KOCAARSLAN sorumluluğundaki lisansüstü derslerin
Pro8 System Help