Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Hidrolik Formüller
19-08-14
36 Čtvrtletní písemná práce
Türkçe Günlük Bülten
yolcular için gümrük rehberi
SG ULTRA MAX MODEL DİJİTAL PORTATİF YOĞUNLUK ÖLÇÜM
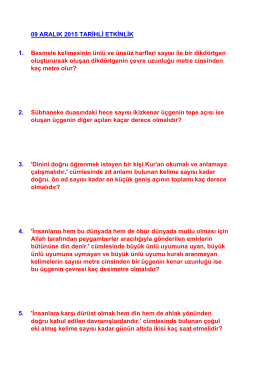
09 ARALIK 2015 TARİHLİ ETKİNLİK 1. Besmele kelimesinin ünlü ve
indir - kocaelimakine.com
3.kolo - Korešpondenčný seminár z chémie
Soruları görmek için tıklayın.
ENGEL victory
BTR125T
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim