Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
MAT201E Differential Equations Midterm Exam 28 March 2015
Document
praktyki studenckie na stanowisku: technolog - chemik
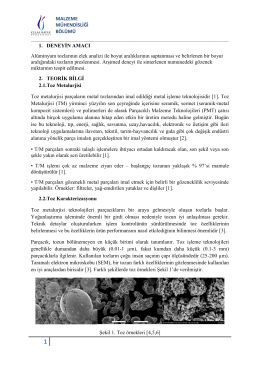
Toz Metalurjisi
Zginanie i skręcanie dwuteowników bisymetrycznych - chodor
Süte uygulana ön işlemler
makina fakültesi 70. yıl seminerleri 2015
Gökdelenler İnşaat Tekniğinde Devrim Yarattı
DIÞ TÝCARET UZMANLIÐI SERTÝFÝKA PROGRAMI GRUP
obchodné podmienky
Eyyübiye
Atık Baca Gazı Kullanımı ile Termoelektrik Jeneratörlerde Elektrik
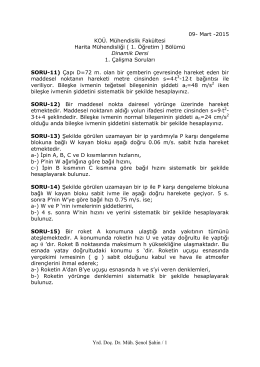
Yrd. Doç. Dr. Müh. Şenol Şahin / 1 09- Mart
Bursa Ekolojik Koşullarında Bazı İki Sıralı Arpa
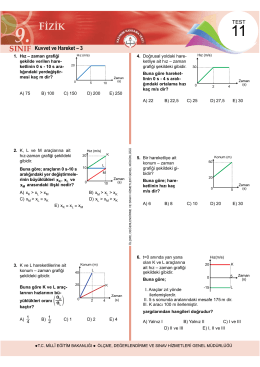
11.TEST
Untitled
Slayt 1
Yumuşak Zeminlerde Yapılan Betonarme Binaların Deprem
BÖLÜM 5: MADDESEL NOKTANIN KİNETİĞİ: İZAFİ HAREKET 5.1
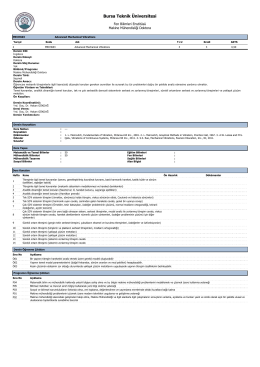
MECH603 - Bursa Teknik Üniversitesi
Poisson ve Laplace Denklemleri ile Problem Çözümü 1. Ortamda
Mühendislik Matematiği Final Sınavı Çalışma Soruları (İnşaat Müh
Dişli Çark_hesaplamalar_2013