Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
pdf - mail.ipb.ac.rs
เอกสารเผยแพร่เดือนกรกฏาคม
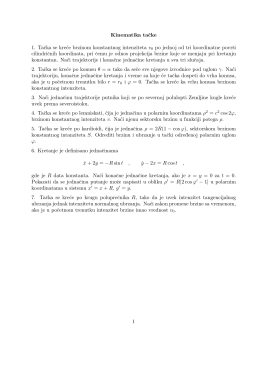
Izbor mogućih zadataka za mašinijadu iz oblasti mehanike
odavde - mail.ipb.ac.rs
Lecture notes
TEORIJSKA MEHANIKA Lagranzeva i Hamiltonova mehanika
Predavanje br.10 i br.11
pdf dosyası - Afyon Kocatepe Üniversitesi İktisadi ve İdari Bilimler
Przestrzenie de Branges`a-Rovnyaka
Lekcja 7: Rozwój koncepcji architektonicznych
Univerzitet u Banjoj Luci Elektrotehnicki fakultet
tubitak uzay araştırmacı mülakat sonuçları tubitak uzay teknisyen
Skripta_Mehanika 2
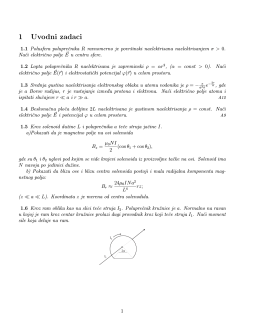
1 Uvodni zadaci
Otvori PDF - Veliki Prasak
ELEKTRODINAMIKA
(PDF, 429KB)
Teorija elementarnih cestica
Preuzmite celu knjigu - ANTIC.org-SNN
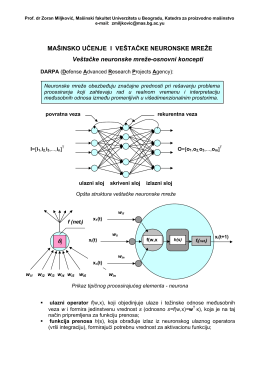
Машинско учење и вештачке неуронске мреже
MEHANIKA FLUIDA Dinamika viskoznog fluida
Senzori i aktuatori