Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Машинско учење и вештачке неуронске мреже
Infirmière ou infirmier (travaux pratiques) – Banque de candidatures
Téléchargez la brochure - Collège de Bois-de
Projekty uchwał
Wyprawa KW Poznań w góry najwyższe w 2014 r. – propozycje
La révolution des «super infirmières» attend son
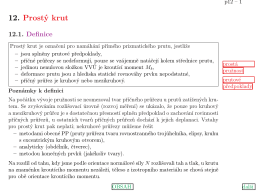
krut
DEMANDE D`EMPLOI POUR UN POSTE D`ENSEIGNANT DE
wyniki niedziela
Světová zdravotnická organizace
Kontaktologické listy 4/2014 - Česká kontaktologická společnost
INTELIGENTNI SISTEMI Sadržaj izlaganja
Predviđanje maksimuma dnevne potrošnje električne
Voici le prénom «Firstname»
pdf - mail.ipb.ac.rs
KPSS Cini - SohbetElit.Net
Vendredi 14 octobre 2016
KONVEKSNO PROGRAMIRANJE 1
j - FER
TEORIJSKA MEHANIKA Lagranzeva i Hamiltonova mehanika
konveksna analiza 1
Viega predzidna tehnika. Sistemi za kreativno oblikovanje kupatila.
ISSN 0042-8469 - Војнотехнички гласник