Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Predavanje br.10 i br.11
Praktická úloha celostátního kola 48
Merestechnika ZH Feladatok.pdf
T.C. - Kula İlçe Milli Eğitim Müdürlüğü
Full Text - Journal Of Business Research
Skripta_Mehanika 2
Predavanje br.1
MATERIJAL ZA VEZBE Predmet: MATEMATICKA ANALIZA 2
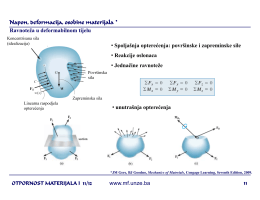
Napon, deformacija, osobine materijala * Ravnoteža
Уџбеник
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim
pdf - mail.ipb.ac.rs
x - Trakya Üniversitesi
Zakopane2015 Piotr Konieczka
studijní text k Newtonovým rovnicím s vazbami
Bölüm-III-sunu
Teoria błędów
3.Ders
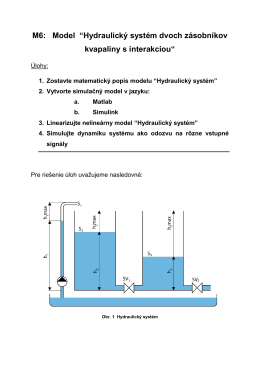
Hydraulický systém - dve nádoby v interakcii
4.3 ความยาวส วนโค ง ในหัวข อนี้จะศึกษาการหาค