Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
x - Trakya Üniversitesi
İndir - İşkur
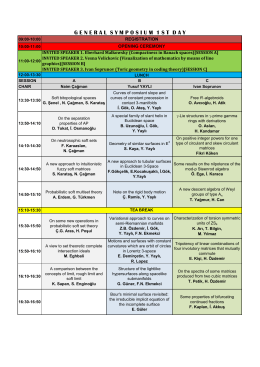
generalsymposıum 1 stday
here
Bolum_4
Predavanje br.10 i br.11
aaaaaaaaaaa
Deney 4
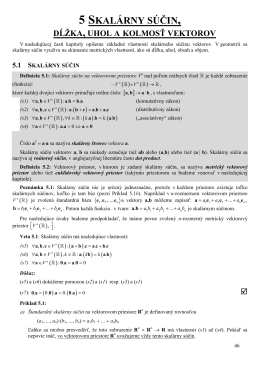
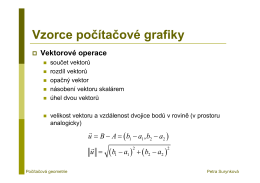
5 skalárny súčin, dĺžka, uhol a kolmosť vektorov
Wykład 1 - Instytut Teleinformatyki
A A A A A A LYS-1 MATEMATİK TESTİ - İzmir İl Milli Eğitim Müdürlüğü
Siyasal Bağlamında Türkiye`nin Yeni Anayasa Yazım Girişimi
DİFERANSİYEL DENKLEMLER 2008-2009 Güz
Mühendisler İçin DİFERANSİYEL DENKLEMLER
Ders 3
Nisan Ayı Gece Gözlemi
ÖZGEÇMİŞ VE ESERLER LİSTESİ
přednáška1 (.pdf)
Bölüm 1_Maddesel Noktanın Kinematiği
BÖLÜM 3
E-Ticaret Hizmet Sözleşmesi