Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Ders
Ders -1
3.4
Yildiz Teknik ¨Universitesi ˙Iktisat Bölümü Yüksek Lisans Programı
Verimlilik (pdf) - Tarık Küçükdeniz
Untitled - Remzi Kitabevi
Kaynakçı ve Kaynak Operatörü Program Kuralları
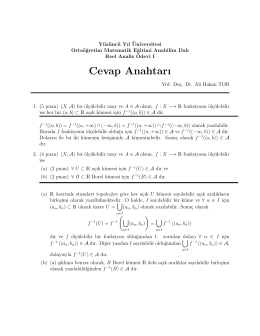
1. Ödev Çözümleri - Yüzüncü Yıl Üniversitesi
1. Normal Uzaylar
Boole Fonksiyonları (Boolean Functions)
Ders
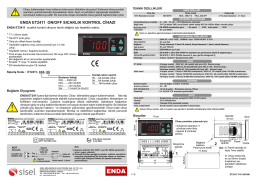
enda et2411 on/off sıcaklık kontrol cihazı
md demiryolu mühendislik danışmanlık ile makas
ÜRÜN ÖZELLİKLERİ İÇİN LÜTFEN TIKLAYINIZ
4. Ders - Alper BAYRAK - Abant İzzet Baysal Üniversitesi
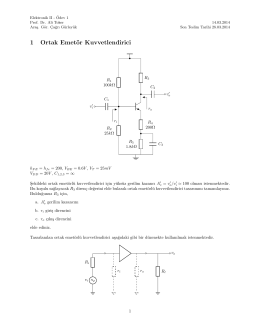
1 Ortak Emetör Kuvvetlendirici
1.5 Tanım Düzeyinde Ayrısım¨Ozellikleri
1.4 Tychonoff Teoremi
ÜRÜN ÖZELLİKLERİ İÇİN LÜTFEN TIKLAYINIZ
1.4 Topolojinin Tabanı
1 CMOS Statik Kapı Tasarımı 2 Kademeli Sürücü Tasarımı
Cümle Kalıpları: Seyahat | Tarihler ve zaman (Türkçe
Artun İstepan Şabciyan