Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
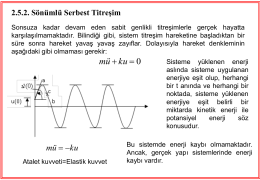
2.5. Serbest Titreşim
Temel konular2
Ders Sunumu içit Tıklayınız
Poisson ve Laplace Denklemleri ile Problem Çözümü 1. Ortamda
Elektrik-1
Karel WPU-7800G WİFİ TELEFON Kataloğu
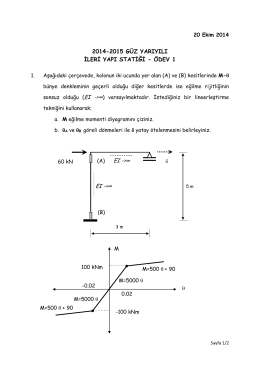
21.10.2014 Odev 1
usis-Yapı Fiziği-hacim akustiği 1. bölüm - yarbis
Dsolve komutu basit diferansiyel denklemler çözülebilir
MAT201E Differential Equations Midterm Exam 28 March 2015
UZAYDA VEKTÖRLER - www.omersencar.com
Dişli Çark_hesaplamalar_2013
İndir
Bilgiçağı Koleji
Postupci orijentacije snimaka
buradan - Türk Matematik Derneği