Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Svetový deň bez tabaku 2016
2.Gün Ses Kayıtları Deşifre
BİLGİ NOTU KONU: TÜİK Dış Ticaret İstatistikleri, Ekim 2015 TARİH
Deň pracoviska - Spojená škola J. Henischa
tc kto karatay üniversitesi mühendislik fakültesi
ortaokul türkçe ders kitaplarında ve öğretmen
Svetový deň bez tabaku - Spojená škola J. Henischa
Zápis z jednání studijní rady oboru Informatika dne 14
usis-Yapı Fiziği-hacim akustiği 1. bölüm - yarbis
Svetový deň bez tabaku 31. máj 2016
31. máj - Svetový deň bez tabaku
Trh práce, prebytok a nedostatok
Svetový deň bezpečnosti a ochrany zdravia pri práci
ELEKTRİK-ELEKTRONİK MÜHENDİSLİĞİ DENETİM SİSTEMLERİ
MECH603 - Bursa Teknik Üniversitesi
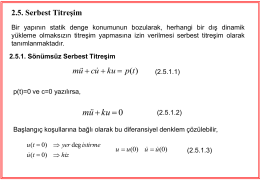
2.5. Serbest Titreşim
1420 KB - Makina Mühendisleri Odası
Yüksek Performanslı Yeni Bir Araç Ön Gövdesinin
Tek Katlı Betonarme Sanayi Yapıları İçin Hızlı Hasar Hesaplama
indir
ultrasonic banyo cihazları