Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Postupci orijentacije snimaka
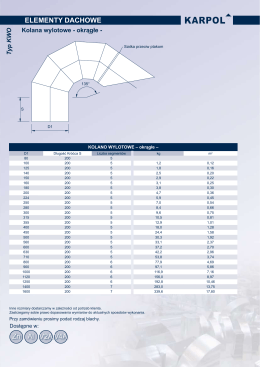
Pobierz kartę producenta
Modelsko prediktivno upravljanje stupnim kranom zasnovano
null
Alumil - Zen vrata - Gradjevinarstvo.rs
cenovnik - INFOTEXT
cenovnik - INFOTEXT
Pitanja za proveru znanja
akfen gayrıimenkul yatırım ortaklığı a.ş. lıst of attendants
Diplomski rad
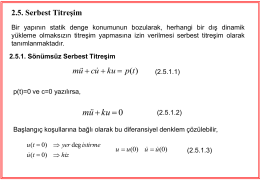
2.5. Serbest Titreşim
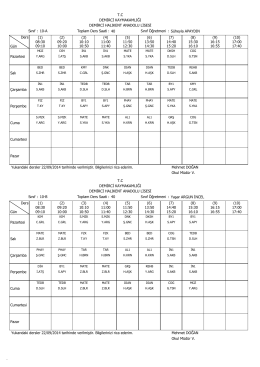
10-A Toplam Ders Saati : 40 Sınıf Öğretmeni
5 Tangentni premotač kartona