Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
5.GeriBildirimin_Avantajlari
Vücut suyu - Uzman Veteriner
Romatoid Artrit. Hayatı aktif yaşamak.
Karıncanın Ayak Sesinden Gizli Kalbî Maraz: Riya B
ı.yarıyıl
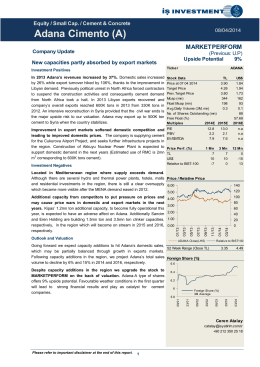
Adana Cimento (A)
2014-2015 Bahar BİL 691/692/791/792 Seminer Dersleri
Toz Kömür Brülörü - Personel Web Sistemi
SENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
sınav kaygısı
Konu 3
Genel Muhasebe 3 Hafta
144
Yildiz Teknik ¨Universitesi ˙Iktisat Bölümü Yüksek Lisans Programı
sağlık düzeyini belirleyen epidemiyolojik ölçütler
İfade Özgürlüğü Kapsamında Toplantı, Gösteri Yürüyüşü ve Basın
kan basıncını düşüren ilaçlar
bir fazlı motorlar - Bülent Ecevit Üniversitesi
sunum
DERS 9 Doğrusal Programlama
1 481203 1 Standart Konut 2 MMA Endeks 1
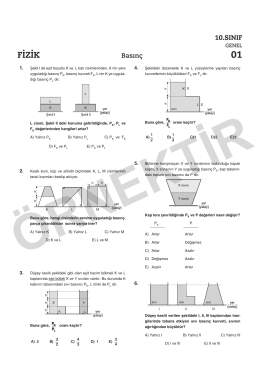
01. FiZiK 10 KK
AUDIO ANALOGUE Puccini Anniversary – teknik tanıtım - Can Hi-Fi