Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
SENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
bir fazlı motorlar - Bülent Ecevit Üniversitesi
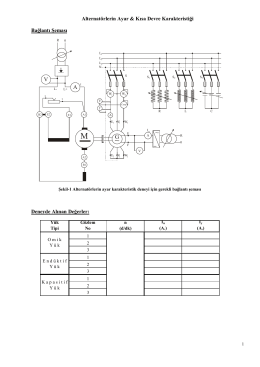
Alternatörlerin Ayar & Kısa Devre Karakteristiği Bağlantı Şeması
Systemy sterowania oświetleniem
ASENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
Enerji Dönüşüm Temelleri Konu: Transformatörler
Bosch marş motorları ve alternatörleri
Fiyat listesini görmek için tıklayınız. - E-Gaz
KAM 25-32 A Aydınlatma Busbar Kanal Sistemi KAP
k-sabitli Filtre Parçaları
Elektrik İşlerinde İş Sağlığı Ve Güvenliği
İndir
5.GeriBildirimin_Avantajlari
ELEKTRİK DEVRELERİ-2 LABORATUVARI IV. DENEY FÖYÜ
elektrik motorları ve sürücüleri 4 (İndirme : 5)
European Commission
indir
Ülke Ticaret Sicili ve Vergi No Örnekleri
Detaylar için tıklatınız.
Pnomatik Vana ve Alıcılar - Megep
ASENKRON MAKİNALAR - Bülent Ecevit Üniversitesi
Yazım Kuralları - Süleyman Demirel Üniversitesi
Devre Analizi - I Laboratuvarı Deney Föyü