Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
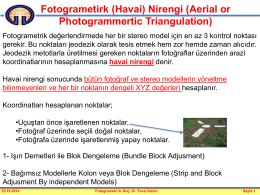
GPS/INS Destekli Havai Nirengi
GPS/INS Destekli Havai Nirengi
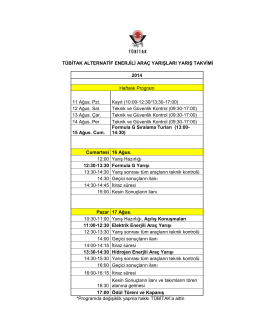
TÜBİTAK ALTERNATİF ENERJİLİ ARAÇ YARIŞLARI YARIŞ
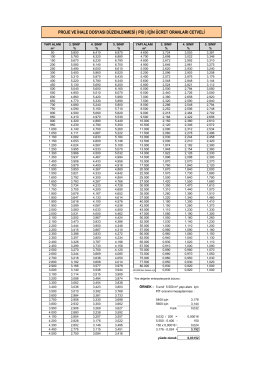
PİD Oranları
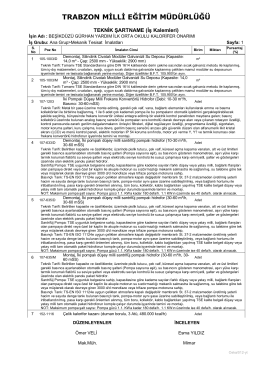
TRABZON MİLLİ EĞİTİM MÜDÜRLÜĞÜ
Haklar tombalası!
NETWORK VIDEO RECORDER SERIES
Teslimat Programı
Toplu Yoklama Oturumları
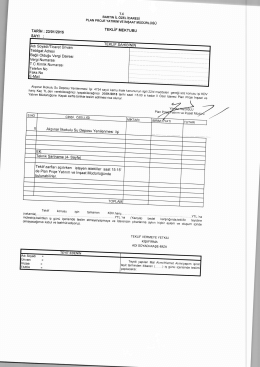
Teklif Mektubu ve Teknik Şartname
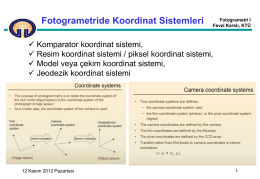
foto1.hafta4
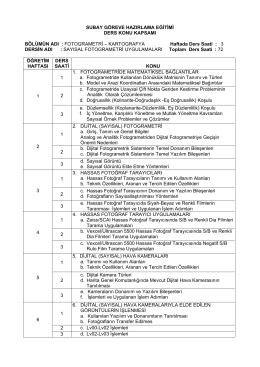
SUBAY GÖREVE HAZIRLAMA EĞİTİMİ DERS KONU KAPSAMI
Competitive Mobile Broadband Performance Research
Slayt 1
AVALANCHE MÜZAYEDE
CY_Hafta 14
TÜRKİYE YÜKSEKLİK SİSTEMİNİN MODERNİZASYONU PROJESİ
Jeodezik Kontrol Ağları
Av. Hüseyin ERSÖZ
TRABZON MİLLİ EĞİTİM MÜDÜRLÜĞÜ
TEKNİK ŞARTNAME FORMU
HAVADAN GÖRÜNTÜ ALMADA PANASONIC VE KAAN HAVACILIK