Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
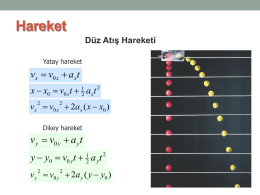
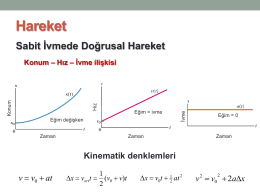
2_2_Duzlemde_Egrisel_Hareket
Teoria rugownika i wyróznik ciała (B. Klockiewicz)
abdulkadir gül*** abdullah kar*** abdurrahman tan*** ahmed faruk
Boğaziçi üniversitesi rektörlük davet yazısını ve seminer
Ara Dönem Yönetim Kurulu Faaliyet Raporları - Eylül
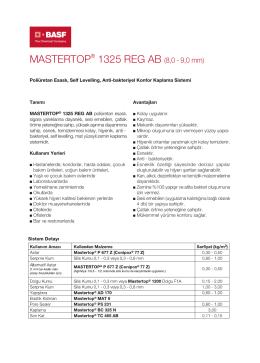
Ürünün içerik detayı için TIKLAYINIZ
STATİK - AnkaAkademi.com
STATİK - AnkaAkademi.com
Mühendislik Ölçmeleri Ders Notları
YÜKSEKÖĞRETİME GEÇİŞ SINAVI (YGS) 23 MART 2014
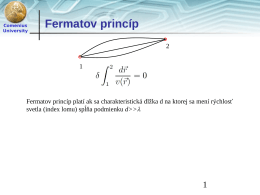
Vlny a Optika
STATİK - AnkaAkademi.com
STATİK - AnkaAkademi.com
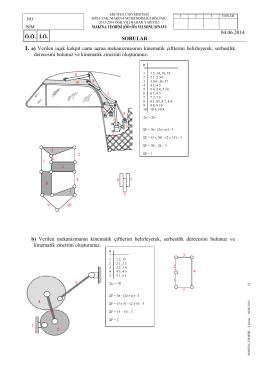
2013-2014 Final Sınav Soruları ve Cevapları
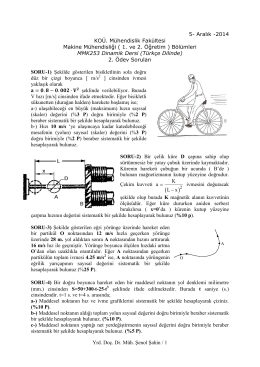
Yrd. Doç. Dr. Müh. Şenol Şahin / 1 5- Aralık
Kratko uputstvo – podsetnik za Excel
Festival kitapçığı için tıklayınız!
ktae altindane bugday brosur
2_4_Birbirine_Bagli_Hareket
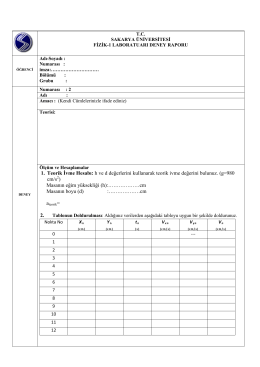
1. Teorik İvme Hesabı: h ve d değerlerini kullanarak teorik ivme
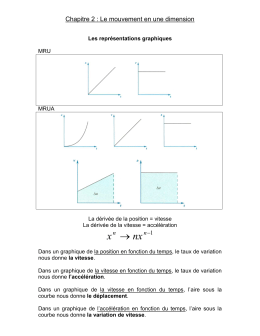
Chapitre 2