Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
2013-2014 Final Sınav Soruları ve Cevapları
kıy.taze fasülye şeh.pilav izmir köfte pey.makarna çiftlik kebabı
PRODEJNÍ DEN KNIH NA FAKULTĚ SPORTOVNÍCH STUDIÍ
2016_Procedura_posle_polaganja_prijemnog_ispita_30062016
Vize Programı
procedura posle polaganja prijemnog ispita 2016.
μ ψ θ θ δ F
Fourier Serisi - Bilecik Şeyh Edebali Üniversitesi Makine ve İmalat
Kazanım: Çokgenlerin iç açılarını ve özelliklerini tanır. 180).3(
Karmaşık Sayılar - Trigonometri Karması
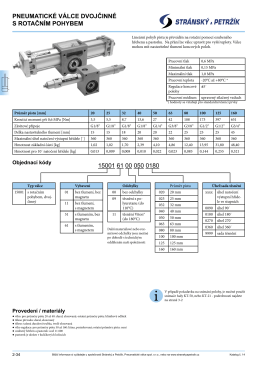
Katalogový list v PDF
Instrukcja - Wydział Mechaniczny
Download PDF Resume
Hazirun
2_2_Duzlemde_Egrisel_Hareket
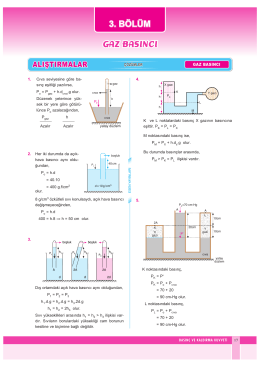
gaz basıncı
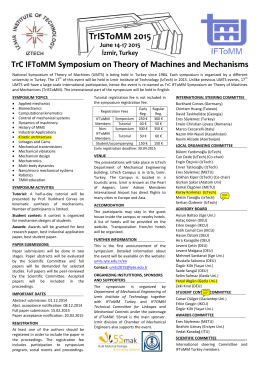
TrC IFToMM Symposium on Theory of Machines
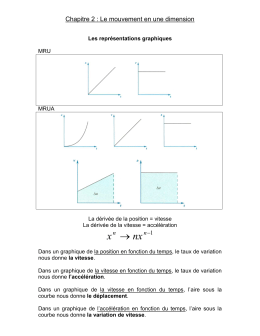
Chapitre 2
Sprinter Minibüs broşürünü indir (PDF)
Toplantı Katılım Listesi.pdf
CUMA ÇA RŞA M BA P ERŞEM BE P AZARTESİ SA LI
Bolum_2-D