Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
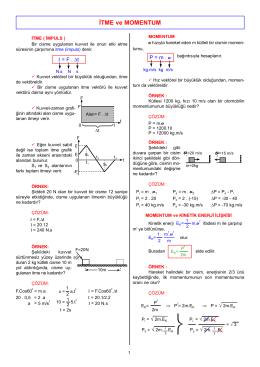
MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1
MADDESEL NOKTANIN KİNETİĞİ: İMPULS ve MOMENTUM 4.1
ELEKTRIK_POTANSIYEL [Uyumluluk Modu]
fizik_1_odev_2
0
Kanun Metni
Cvičení 2 – přehled teorie
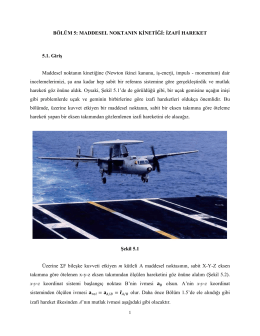
BÖLÜM 5: MADDESEL NOKTANIN KİNETİĞİ: İZAFİ HAREKET 5.1
Untitled
1.GRUPLAR
STATİK - AnkaAkademi.com
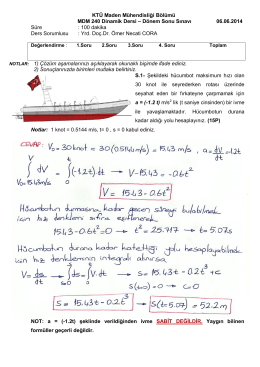
KTÜ Maden Mühendisliği Bölümü MDM 240
Bölüm 1_Maddesel Noktanın Kinematiği
İngiliz Dilbilimi Bölümünün Erasmus+ Anlaşmaları
STATİK (2. Hafta)
FİZİK - fenadami.com
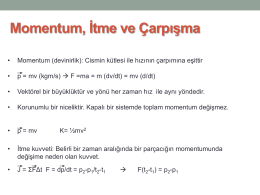
Momentum, İtme ve Çarpışma
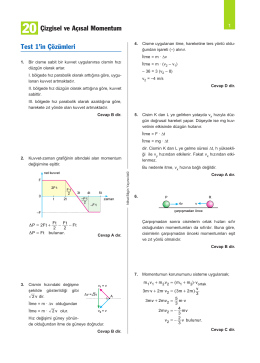
20 cizgisel ve acısal momentum
x - Trakya Üniversitesi
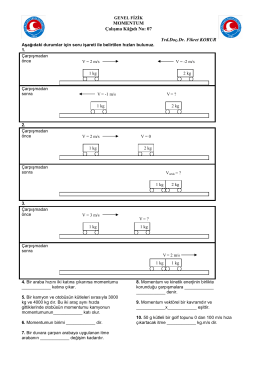
gfodev7 - Yrd.Doç.Dr. Fikret Korur
nükleer madde için yeni bir landau parametre seti
BÖLÜM 3: MADDESEL NOKTANIN KİNETİĞİ: İŞ ve ENERJİ 3.1
NOKTALAMA İŞARETLER sunu

![ELEKTRIK_POTANSIYEL [Uyumluluk Modu]](http://s2.readgur.com/store/data/000023781_1-af824c9790af4e165010fbe0c7ebc731-260x520.png)