Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Vukasin Cirovic, Izgradnja i upravljanje laboratorijskim
Машински факултет — Књига предмета докторских студија
Preuzmite brošuru "REZIDBA DRVENASTOG I JAGODASTOG VOĆA"
Извештај Комисије о оцени докторске
ANALIZA SISTEMA U KOMPLEKSNOM DOMENU
Извештај - Машински факултет
Eвропски Универзитет
praktyki studenckie na stanowisku: technolog - chemik
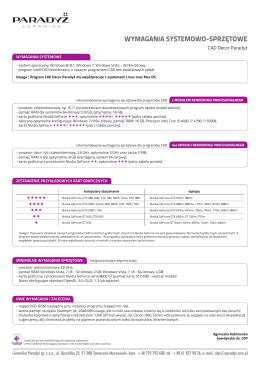
WYMAGANIA SYSTEMOWO
Мр Слађана Недељковић
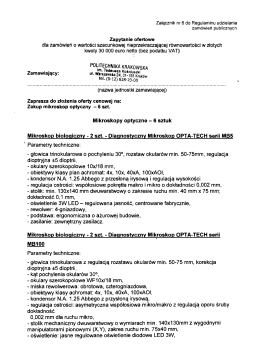
Mikroskopy optyczne - 6 sztuk Mikroskop biologiczny
ОСНОВЕ ПРАКТИЧНИХ ВЕШТИНА Циљеви предмета: Назив и
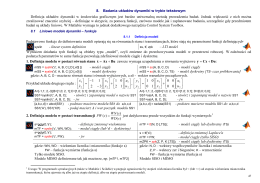
8. Badania układów dynamiki w trybie tekstowym Definicja układów