Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
Извештај - Машински факултет
Untitled
ПРЕВЕНЦИЈА БУБРЕЖНИХ БОЛЕСТИ
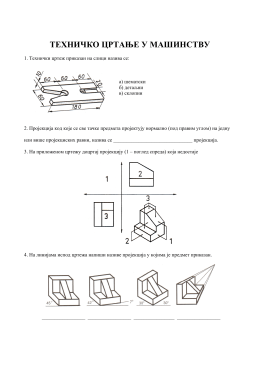
ТЕХНИЧКО ЦРТАЊЕ У МАШИНСТВУ
oпштинско_2012_2013
ПТ - SMEITS
Preuzmite tekst (PDF, 975kB)
SPISAK SRPSKIH STANDARDA IZ OBLASTI MAŠINA
Машински факултет — Књига предмета докторских студија
Vukasin Cirovic, Izgradnja i upravljanje laboratorijskim
Preuzmite program kurseva
POUŽÍVATEĽSKÁ PRÍRUČKA
Europass- Životopis