Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Ders-1
0,8 MB
EET-305 Kontrol Sistemleri Dersini Alan Öğrenciler İçin
PowerPoint Sunusu
Milli Gelir Açığı
Genç Pediatrisler Olgu Sunumları
ayrık-zamanlı kontrol (~ dijital kontrol)
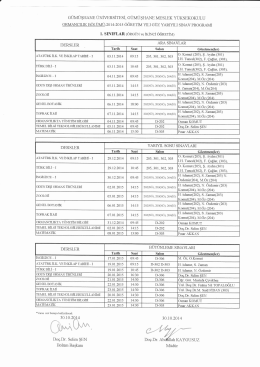
Sınav Programı 2014-2015 GÜZ - Gümüşhane Meslek Yüksekokulu
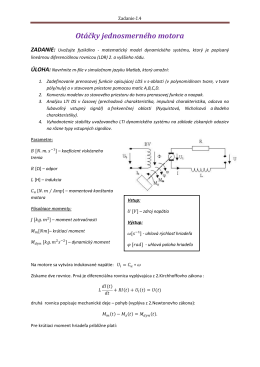
Z4-Otáčky jednosmerného motora
NUTS II
statements - Pusan.ac.kr
tlt desıgn ıstanbul
ANALIZA SISTEMA U KOMPLEKSNOM DOMENU
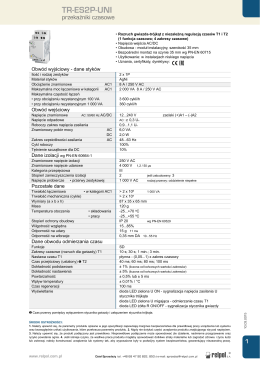
TR-ES2P-UNI
EET-305 Kontrol Sistemleri Laboratuvarı Deney Föyü için Tıklayınız.
Příklady k přednášce 21 - Diskrétní modely spojitých systémů
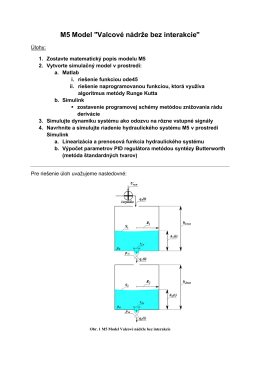
dve nádoby bez interakcie s overením PID algoritmov
Last Minute Grcka 2016
TERMS AND CONDITIONS of the pilot boat rental services
Měření šumového čísla
Lab 3 - Düzce Üniversitesi
Ders Notu 7
bu bağlantıdan