Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
0,8 MB
Divadelní Hromada - Divadlo Potštejn
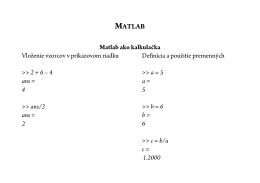
Ders-1
MATLAB Ek Ders 1
TR - Makina Mühendisliği - Dokuz Eylül Üniversitesi
8x8 Tekerlekli Zırhlı Araç Performans Modeli Geliştirilmesi
İnsan Kaldırma Hareketinin Analizi için Tip−2 Bulanık
SÜLEYMANOVA, Naile-DİNLERİN ORTAK DEĞERLERİ
Skills in Doing Proofs - Ankara Üniversitesi Dergiler Veritabanı
SAMOSTATNÁ PŘÍLOHA
Bölüm 1
Divadelní hromada (podzim 2012)
LXX podzim - zima 2014
konvansiyonel ve konvansiyonel olmayan kontrol yüzeyine sahip
farklı işyeri büyüklüğündeki imalat
Programiranje uz crtanje
Ödev Soruları
Priručnik
ataturk-modada-yat-yarisi-2014-s
matlab 1
termodinamik ve insan iradesi
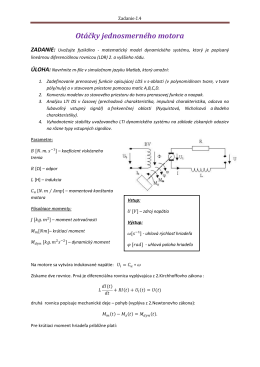
Z4-Otáčky jednosmerného motora