Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
8x8 Tekerlekli Zırhlı Araç Performans Modeli Geliştirilmesi
Results Book
Yapay Zeka Yöntemleri İle Dünya Depremlerinin Modellenebilirliği
anadolu yıldızlar ligi (ke) final yarışmalarına katılacak ferdi sporcular
Konu 3
İçten yanmalı Motorlar - Makine Mühendisliği Bölümü
Page 1 Teknik Bilgi Formu Eski İsmi : Shell Tellus DO Shell Tellus
GEZICI ANKET NISAN 2016
Lekcija 2: Dizajn mehatroničkih Dizajn mehatroničkih sistema
termik santral uçucu kül tiplerinin atıksulardaki fenolün adsorpsiyon
0,8 MB
konvansiyonel ve konvansiyonel olmayan kontrol yüzeyine sahip
C-D-E Sınıfı Soruları ve Cevap Anahtar
ÇELİK AĞIR HIZMET OTOKORKULUĞU ÇARPIŞMA
traktör ömür analizinde esnek cisim dinamik modeli
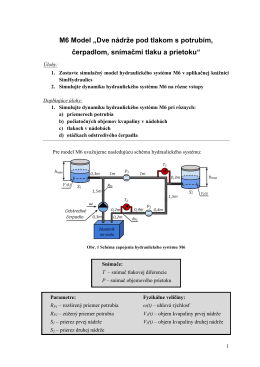
Dve nádrže pod tlakom s potrubím, čerpadlom, snímačmi tlaku a
Aralık 2014 Bülteni - Mutlu Dünya Çocukevi
Marec 2012 - Strojárstvo
MATLAB 5 - MetaCentrum
Su tahsisi Hidroloji Raporları için en uygun tahmin modelleri
Devre Analizi - I Laboratuvarı Deney Föyü
XEPLION 100 mg_KT