Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
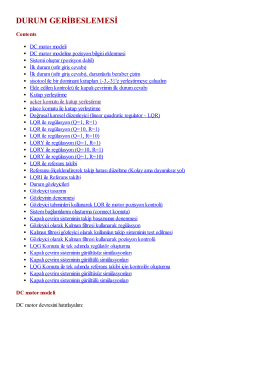
EET-305 Kontrol Sistemleri Dersini Alan Öğrenciler İçin
Ders-1
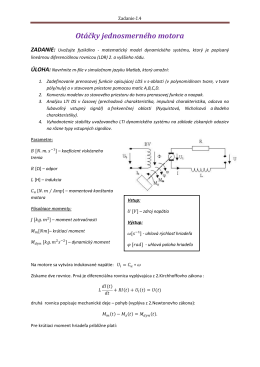
Z4-Otáčky jednosmerného motora
başyazı - Somuncu Baba
YTÜ Elektronik ve Haberleşme Mühendisliği 2013-2014
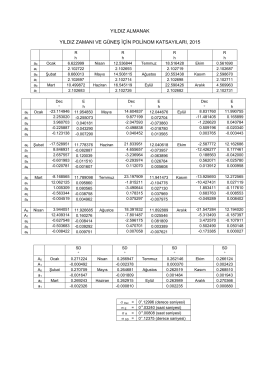
Yıldız Almanak
Yildiz Teknik ¨Universitesi ˙Iktisat Bölümü Yüksek Lisans Programı
EET-305 Kontrol Sistemleri Laboratuvarı Deney Föyü için Tıklayınız.
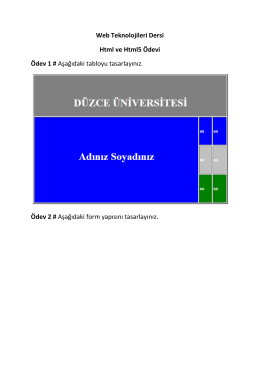
Web Teknolojileri Dersi Html ve Html5 Ödevi Ödev
R - Karadeniz Teknik Üniversitesi
Lab 3 - Düzce Üniversitesi
bilgisayar işletmeni / veri hazırlama ve kontrol işletmeni sınavına
buradan
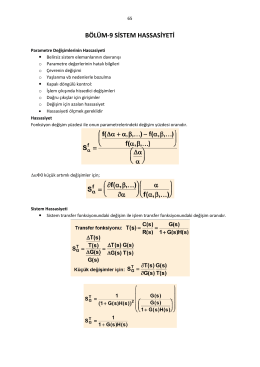
routh – hurwitz kararlılık kriteri
Ödev 2
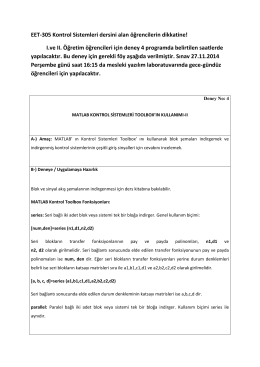
Deney 4
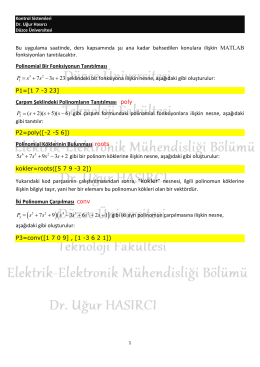
( ) () ( ) ( ) k X z x t x kT x kT z = = ( ) (0) ( ) (2 ) .... ( ) .... X z x x T z x T
buradan
Elektronik Devreler-I Lab. Deney
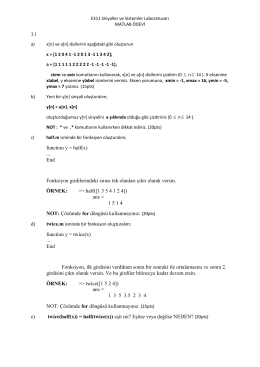
function y = half(x) End Fonksiyon girdilerindeki sırası tek olanları
EET-305 Kontrol Sistemleri dersini alan öğrencilerin dikkatine!
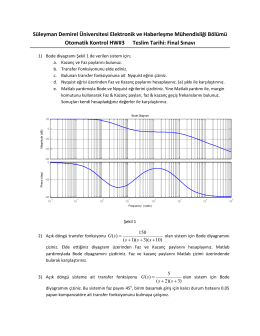
Otomatik Kontrol - Ödev 3 - Süleyman Demirel Üniversitesi
2012_LYS_Mat çöz