Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
ayrık-zamanlı kontrol (~ dijital kontrol)
MATLAB Ek Ders 1
Ders-1
YAKIT HÜCRELİ (PEM) ARAÇLARIN TASARIM ESASLARI
EEM-307: Signals and Systems-I
Yildiz Teknik ¨Universitesi ˙Iktisat Bölümü Yüksek Lisans Programı
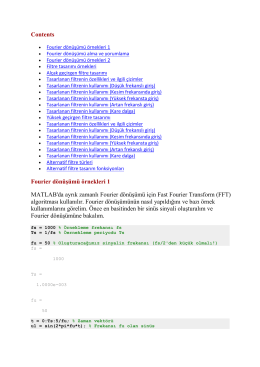
Contents Fourier dönüşümü örnekleri 1 MATLAB
Lisansüstü Çalışmalarda MATLAB
Markov Modelini Kullanarak Robotların Yerini Keşfeden Algoritma
limanlarda ve dalgakıranların civarındaki kıyı bölgelerinde dalga
necmettin erbakan üniversitesi mekatronik mühendisliği bölümü
Contents Sembolik değişken tanımlama
Türk Vergi Sistemi Dersi Ders Notları 2. Konu