Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Sunu 4- Hareket Dirençleri
Aşağıda bazı değerleri verilen araç bir Trilok –Moment Değiştirici ile
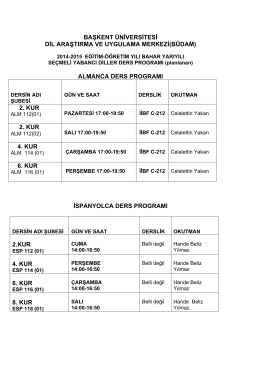
Bahar Dönemi Yabancı Diller Ders Programı
Product Leaflet: BHL 400 BC2-151/160
Kočioni sistem
2015 ııı. çeyrek strateji raporu
K - MapOSMatic
Sunu 8- Diferansiyeller
Product Leaflet: BHD HP-317
Öz Abstract Giriş Euro Bölgesinde İşsizlik Histerezisinin İkinci Nesil
LÜTFEN KAYNAK GÖSTEREREK KULLANINIZ
ORKESTRA ORCHESTRA
GÜNLÜK BÜLTEN
OTOMOBİL:Yapısı itibariyle,sürücüsü dahil en çok 8 oturma yeri olan
Sunu 1- Lastikler
DÜNYA EKONOMİSİNDEKİ SON GELİŞMELER BÜLTENİ
kullanma klavuzu - Alparslan Tarım
Jeodezik Kontrol Ağları
Sunu 7- Mafsallý Miller
Düşen Türk HavaYolları Uçağı nın Enkazı Dün Sabah Bulundu
TST 1 BETONARME ÖDEVİ
DIFERANSIYEL – FWD ve RWD_2014-2015
YGS Temel Mate S.B