Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Kočioni sistem
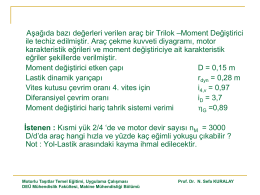
Aşağıda bazı değerleri verilen araç bir Trilok –Moment Değiştirici ile
Listopad, 2016.
Excel l – po şetni korac ci rad da
Uvod u atomsku fiziku J.J. Thomson –Atom je pozitivno nabijena
Prevádzkový poriadok - Evanjelické gymnázium Banská Bystrica
Programirljivi logički kontroleri (PLC)
Sunu 4- Hareket Dirençleri
Sunu 8- Diferansiyeller
Izveštaj o transparentnosti
DIFERANSIYEL – FWD ve RWD_2014-2015
03` 1 1`20 14 Ttiljall*`r
pdf, 316Kb - IPM Essen
Program konferencji (pdf)
78 - dokumentacija
Pellovoj jednadžbi - Mladi nadareni matematičari "Marin Getaldić"
Po lekcjach
Osciloskop - WordPress.com
mehatronika - Mašinski fakultet
Sustavi za rad u stvarnom vremenu - Zemris
Elektrohidraulički robotski manipulator - EHROM
Model 69350
Fizika - halapa.com