Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Programirljivi logički kontroleri (PLC)
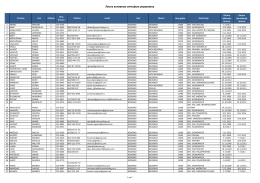
Листа активних стечајних управника
Notlar 9
li rlinultr$ilriufi!ilimlldaihiuli f,ii`iiuui` -1. |!" , ii rL..L dLrI.r` n!vi,..,.i Lrii ir
Lisans tezi - Cemalettin Albayrak
FER-ULX2S
Lean Manufacturing
к Јелине Зоран
Lekcija 2: Dizajn mehatroničkih Dizajn mehatroničkih sistema
METALNI ORMARI KABLOVSKI PRIKLJUČNI ORMARI
CentroPelet ZV14-30-tehničke upute-REGULACIJA-09
Uredbe ministarstva poljoprivrede (.pdf) (download 250 KB)
HPS 749-R -ITA
Kočioni sistem
ELE 433 – Sayısal Filtreler ve Sistemler 2013-2014
Katalog 4 – Elektronika
eeg sinyalleri kullanılarak uyku evrelerinin
08 10 13 Razvodna tabla koju nećete skrivati
DC MOTOR MODELİ
Clanak 1. Clanak 2. Clanak 3. Clanak 4. Clanak 5.
NEWTON MEDIA MONITORING 30.4.2015 - 13.5.2015
Vieta - Seria Ti
Prikaz mogućnosti HSTEC-a na području razvoja OVS