Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Yarıiletken Sensörler Yardımıyla Araç Hareketlerinin
Bayrak Yarışı
Tísňová linka 155
2015: Uvidíte jen tlačítko
Hız Kasisi Uygulamaları ve Hız Azaltım Etkileri: Sakarya Örneği
Şakalak Mart 2015 Tarım Bülteni
Numarası - Fizik Bölümü
ULUSLARARASI PAMUK İSTİŞARE KURULU (ICAC)
Hit Müzik - Milas Medya Arşivi
otomotiv sektörünün yakın geleceği
TURKCELL T
NEW BALANCE BOZCAADA KOŞUSU 2014
10 Km - Kat - Depar Timing
Kuvvet ve Hareket Konulu Test
CARL GUSTAV JUNG (Analitik Psikoloji)
1 CEZA MUHAKEMESİ HUKUKU 4/A SINIFI 2014 YIL SONU
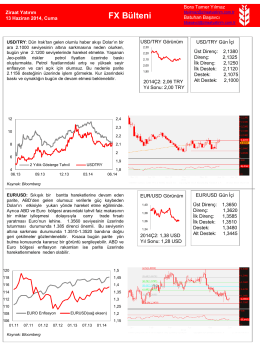
FX Bülteni - Ziraat FX
Yatay Uçuş
1. DTS İhtiyaç tanımlama dokümanı
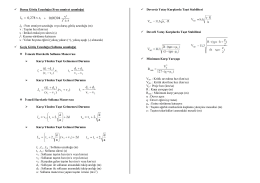
Duruş Görüş Uzunluğu (Fren emniyet uzunluğu) lfe : Fren emniyet
innoCentrum Kamu - innoCentrum - Sistematik İnovasyon Yönetimi
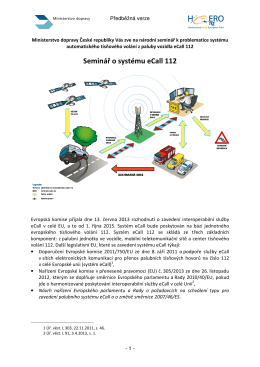
Seminář o systému eCall 112
e-Tebligat ve e-İmza ile İlgili Açıklamalar