Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
hibrit ölçümlerle hedef kestirim algoritması tasarımı
Plán využitia výcvikových a ubytovacích zariadení
Kilis`e yine DAEŞ roketi
Kasım 2014 Risk ve Mühendislik Grubu - CNC
Ders-4 Sistem Gelistirme Sureci ve Modelleri
Soru 1: CCS programında TABLE, LDR, LSL, ADR komutlarını
Müsabakaların sonuçları için tıklayınız…
7kastop.qxp_Layout 1
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim
Oracle BI Answers
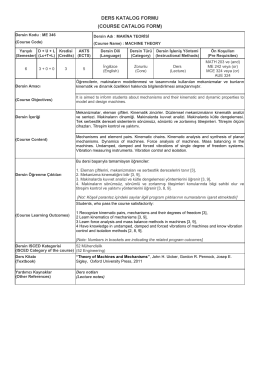
ME 346İndir
Bölüm 1_Maddesel Noktanın Kinematiği
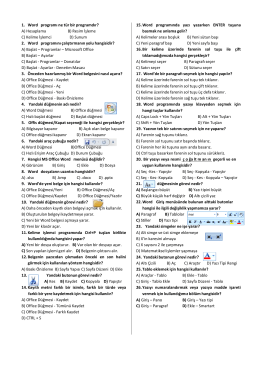
1. Word programı ne tür bir programdır? A) Hesaplama B) Resim
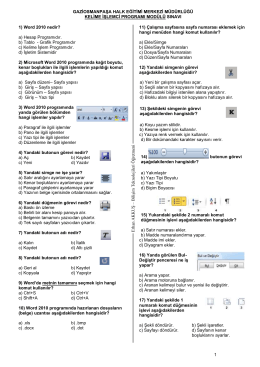
GAZİOSMANPAŞA HALK EĞİTİMİ MERKEZİ
Quadcopter Nasıl Yapılır? 3
NORM ELEKTRON K A.Ş - normelektronik.net
Parallel experiments with RARE-BLAS - Lirmm
Sözleşmeli İnfaz ve Koruma Memurluğu Boy – Kilo Ölçüm Tutanağı
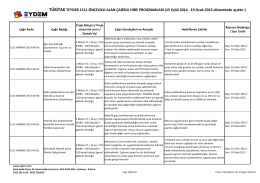
TÜBİTAK 1511 Programı Kapsamında Yeni Çağrılar için Başvurular
Devamını okumak için tıklayınız.
bu linkte bulabilirsiniz
Tam Metin (PDF) - Turkish Studies
ULUSAL Açık Destek Çağrıları