Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Quadcopter Nasıl Yapılır? 3
Quadcopter Nasıl Yapılır?
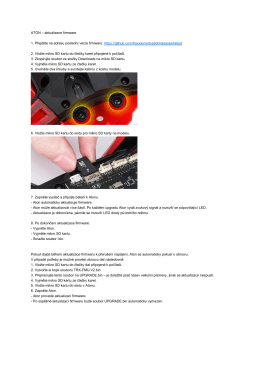
ATON – aktualizace firmware 1. Přejděte na adresu poslední verze
INSTRUKCJA OBSŁUGI Modułu EvB Anduino Leonardo - And
İpuçları, test ve onarım bilgileri: Disk freni
ilköğretimde müzik eğitimi (türkiye ve nijerya örneği)
BAKAL Á Ř SK Á PR Á CE Distribuované řízení formace kvadkoptér
Quadcopter Nasıl Yapılır? 1
R - Karadeniz Teknik Üniversitesi
SAMPA BRÜT FİYAT LİSTESİ SON LİSTE (version 2).xlsb
hibrit ölçümlerle hedef kestirim algoritması tasarımı
Dosyayı İndir - TOBB Ekonomi ve Teknoloji Üniversitesi Açık Erişim
İnsansız Hava Araçları ve Uçuş Eğitimi
Oracle BI Answers
Mekanik Tesisat
Quadcopter Nasıl Yapılır? 5
Genel Kurallar - Bilim Kahramanları Derneği
konvansiyonel olmayan iki farklı kontrol yüzeyinin yapısal
İpuçları, test ve onarım bilgileri: Kampanalı frenler
PHANTOM 3 - freeway.com.pl
ımu kalman filtresi uygulaması
UBEC FOXY manual
Nastavení sluchátek