Read
Gur
☰
Explore Categories
Sign in
Sign up
Upload
×
Download
No category
2B Polar Koordinat Sistemi
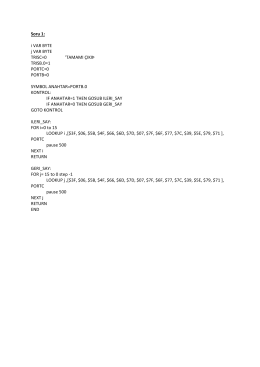
Soru 1: CCS programında TABLE, LDR, LSL, ADR komutlarını
İstanbul Aydın Üniversitesi:: Uygulama Dergileri
Lisansüstü Çalışmalarda MATLAB
1411080272-konferans-afisi-pdf
(a) Enzim yapısı / kataliz (b) mRNA yapısı / protein
Tic Tac Toe
SANAT VE ELEŞTİRİ
ek madde-1
Calgary Şizofrenide Depresyon Ölçeği
Boğaziçi University Prof. Şevket Pamuk ATA 531 Fall 2014 Ataturk
Soru 1
3.sınıf Matematik (doğru-ışın-doğru parçası)