Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
Ders Notu
Python3.x - İstihza
Dsolve komutu basit diferansiyel denklemler çözülebilir
DİFERANSİYEL DENKLEMLER 2008-2009 Güz
expoMED & NKU Biyomedikal 4. Sempozyum Gelecegin
Final icin cevapli calisma sorulari
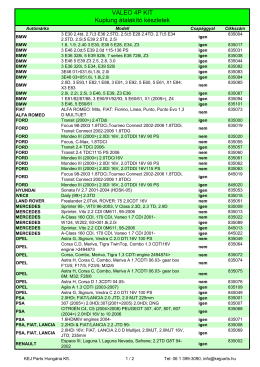
VALEO 4P KIT Kuplung átalakító készletek
Mühendislik Fakültesi, Gıda Mühendisliği, Mühendislik Matematiği
BİST - 30 MEKANİK ÖNERİ TABLOSU
MAT301 Cebir I Final Soruları ve Çözümleri
ankara üniversitesi fen bilimleri enstitüsü yüksek lisans tezi parçalı
ITO Semestráln´ı projekt
final ve çözümleri
1.1 Neodre ¯deni integral
10 ELEKTRICKÝ PRÚD
Laplaceova transformace
1.2 Noktasal Limit Fonksiyonun Süreklili˘gi
1 LINEÁRNÍ DIFERENCIÁLNÍ ROVNICE 2. ŘÁDU (LDR2.ř)
Ders1
Ödev Soruları
t - Fyzika Zeme
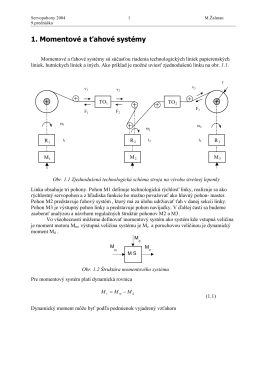
9 pr_Tahove syst_my.pdf
listy zadań z odpowiedziami