Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
PR2 BLDC motory a SMPM
Žilinská univerzita v Žiline INTELIGENTNÝ ZDROJ PRE
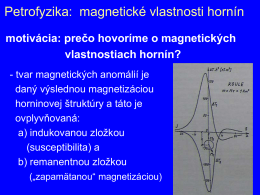
Susceptibility
View/Open
Ankastre Paketler
Katalóg práčky 2012
Špeciálna zimná ponuka Od 1.12.2012 – do vypredania zásob
A-1 B-1 Návod na montáž počítača a bezdrôtového
Frekvenční měniče - Ing. Pavel Kobrle
6,50 - Autodiely DD AUTO
L`Institut français du Koweït, recrute Un(e) CHARGE(E) DU
PREZENTÁCIA K 60. VÝROčIU ZALOžENIA KATEDRY (1953
Audit mazania
iii. vedenie elektrického prúdu v kovových vodičoch
Zoznam CD-ROM - Štátna vedecká knižnica v Banskej Bystrici
FINANSIJSKI PLAN 2015 - HomeOpsta bolnica Aleksinac
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA 2007 Ján
Snímanie mechanických veličín
Unikátne vektorové riadenie VONSCH
PR5 Asynchrónne motory 2
Nekonvenčné motory pre automobily
Teória - Elektrické pole a elektrický prúd
Autori: doc. RNDr. Roman Pašteka, PhD. RNDr. Ján