Read
Gur
☰
Explore
Log in
Create new account
Upload
×
Download
No category
ŽILINSKÁ UNIVERZITA V ŽILINE DIPLOMOVÁ PRÁCA 2007 Ján
Uživatelský manuál EKOREG-BXC - verze 2
Žilinská univerzita v Žiline
Karta produktu Hewalex - pompy obiegowe i sterowniki
Systém pro přesné měření elektrické délky koaxiálních kabelů
Katalóg práčky 2012
İşletim Sistemleri - İstanbul Teknik Üniversitesi
Návod na obsluhu elektronických manažérskych
Tréningové systémy pre techniku pohonov
document [.pdf] - Vysoké učení technické v Brně
Slide 1
PR2 BLDC motory a SMPM
Návod na obsluhu trezorov EURON a EURON 110
error error error error error error error error error error error error
Produkty-automobilová diagnostika: brožura - JB
Krokove motory.pdf
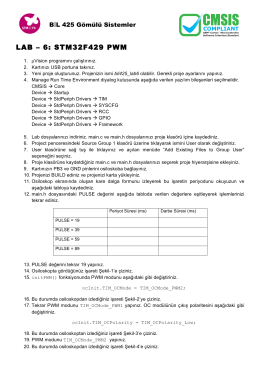
LAB – 6: STM32F429 PWM
kapitola spinany reluktancny motor.pdf
Előadásjegyzet
วาร์ฟารินคลินิก รพ[1].แพร่ 1
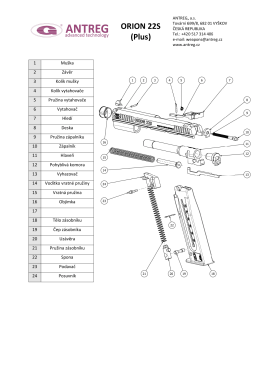
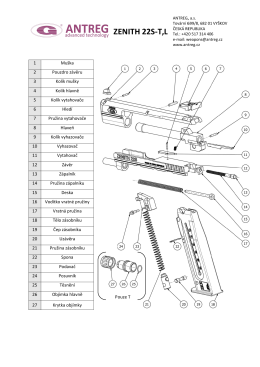
ROZPAD ORION S22 V03
ROZPAD V03
Prosesler Arası Eş zamanlama


![document [.pdf] - Vysoké učení technické v Brně](http://s2.readgur.com/store/data/000160823_1-e1f81cd5cb498f26f44acb93ac24f824-260x520.png)




![วาร์ฟารินคลินิก รพ[1].แพร่ 1](http://s2.readgur.com/store/data/001691730_1-dd0beac7716842ea8c12223857306fbf-260x520.png)